Robota Polurmaŝino - Altpreciza Aŭtomata Surfaca Finpolurado





Detala Diagramo
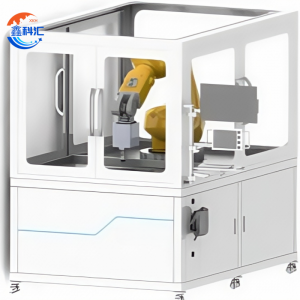

Superrigardo de Robota Polurmaŝino
La Robota Polurmaŝino estas progresinta, plene aŭtomatigita surfac-prilabora sistemo, desegnita por plenumi la plej altajn postulojn en preciza fabrikado. Ĝi kombinas ses-aksan robotan kontrolon, fort-regulan polurteknologion kaj duoblan kapan konfiguracion por pritrakti vastan gamon da materialoj kaj kompleksajn geometriojn kun escepta precizeco kaj konstanteco.
Ĉu por optikaj lensoj, aerspacaj partoj, precizaj inĝenieraj komponantoj aŭ duonkonduktaĵaj aplikoj, ĉi tiu maŝino liveras stabilajn, ripeteblajn kaj altkvalitajn surfacajn finpolurojn - eĉ ĉe nanometraj tolerancoj.


Ampleksa Kongrueco de Laborpecoj de Robota Polurmaŝino
La sistemo subtenas prilaboradon de:
-
Plataj surfacojpor vitro, ceramikaĵo kaj metalaj platoj
-
Cilindraj kaj konusaj formojkiel ekzemple rulpremiloj, ŝaftoj kaj tuboj
-
Sferaj kaj asferaj komponantojpor optikaj sistemoj
-
Liberformaj kaj ekster-aksaj surfacojkun kompleksaj kurboj kaj transiroj
Ĝia multflankeco igas ĝin taŭga porkaj amasproduktado kaj altpreciza laŭmenda fabrikado.
Kernaj Trajtoj kaj Avantaĝoj de Robota Polurmaŝino
1. Teknologio de Duobla Poluriga Kapo
-
Ekipita perunu-rotaciakajmem-rotaciopolurkapoj por fleksebleco.
-
Rapida iloŝanĝa kapablo subtenas plurajn prilaborajn reĝimojn sen longa malfunkciotempo.
-
Ideala por ŝalti inter malglata kaj fajna polurado.
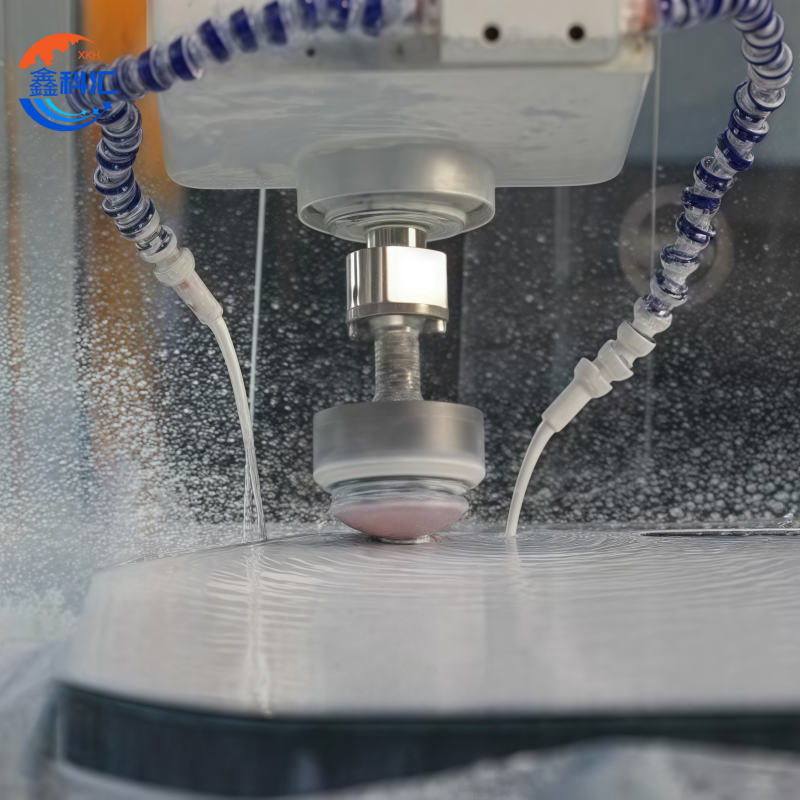
2. Preciza Forto-Kontrola Sistemo
-
Realtempa monitorado depremo, temperaturo, kaj fluo de polurfluido.
-
Konstanta fortapliko certigas unuforman surfacan finpoluron tra la laborpeco.
-
Kapabla aŭtomate adaptiĝi al surfacaj neregulaĵoj.
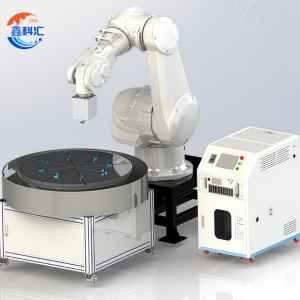
3. Ses-aksa robota kontrolo
-
Plena moviĝlibereco por pritrakti kompleksajn geometriojn.
-
Glataj, precizaj movvojoj kalkulitaj per progresintaj algoritmoj.
-
Alta ripetpozicia precizeco de ±0,04 mm ĝis ±0,1 mm depende de la modelo.
4. Inteligenta Aŭtomatigo kaj Mezurado
-
Aŭtomataj kalibraj iloj por preciza agordo kaj vicigo.
-
Koordinata mezursistemo por preciza poziciigado.
-
Laŭvolareta dikeco-monitoradopor realtempa kvalito-kontrolo.
5. Industria-nivela konstruokvalito
-
Duobla servomotora dezajno pliigas poluran efikecon kaj stabilecon.
-
Rigida mekanika strukturo minimumigas vibradon kaj certigas longdaŭran daŭripovon.

Teknikaj Specifoj de Robota Polurmaŝino
| Ekipaĵa Modelo | Robota Korpo | Ripeta Poziciiga Precizeco | Prilabora Diametra Gamo | Ununura Rotacia Polurkapo | Multrotacia Polurkapo | Malgranda Ilo | Ĉefa Rada Tipo Polurado | Sfera Kapa Polurado | Fini Rapidan Ŝanĝon | Aŭtomata Kalibrada Ilo | Koordinata Mezura Kapo | Interreta Dikeca Monitorado | Numera Kontrola Platformo |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0.04mm / plena gamo | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0.05mm / plena gamo | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0.05mm / plena gamo | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0.06mm / plena gamo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0.1mm / plena gamo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0.1mm / plena gamo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0.1mm / plena gamo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Oftaj Demandoj – Robota Polurmaŝino
1. Kiujn specojn de laborpecoj povas pritrakti la robota polurmaŝino?
Nia robota polurmaŝino subtenas diversajn formojn kaj surfacojn, inkluzive de plataj, kurbaj, sferaj, liberformaj kaj kompleksaj konturoj. Ĝi taŭgas por optikaj komponantoj, precizaj muldiloj, metalaj surfacoj kaj aliaj altprecizaj poluraj aplikoj.
2. Kio estas la diferenco inter unu-rotaciaj kaj plur-rotaciaj polurkapoj?
-
Ununura Rotacia PolurkapoLa ilo rotacias ĉirkaŭ ununura akso, ideala por norma surfacfinpolurado kaj altrapida materialforigo.
-
Multrotacia PolurkapoLa ilo kombinas rotacion kun memrotacio (orbitado), ebligante pli unuforman poluradon sur kurbaj kaj neregulaj surfacoj.
3. Kio estas la maksimuma diametro de prilaborado?
Depende de la modelo:
-
Kompaktaj modeloj (ekz., IRP500S) pritraktasΦ50–Φ500mm.
-
Grandskalaj modeloj (ekz., IRP2000AD) pritraktas ĝisΦ2000mm.
Pri Ni
XKH specialiĝas pri altteknologia disvolviĝo, produktado kaj vendado de speciala optika vitro kaj novaj kristalaj materialoj. Niaj produktoj servas optikan elektronikon, konsumelektronikon kaj la militistaron. Ni ofertas safirajn optikajn komponantojn, kovrilojn por poŝtelefonaj lensoj, ceramikaĵojn, LT, silician karbidan SIC, kvarcon kaj duonkonduktaĵajn kristalajn obleojn. Kun sperta sperto kaj pintnivela ekipaĵo, ni elstaras en nenorma produkto-prilaborado, celante esti gvida altteknologia entrepreno pri optoelektronikaj materialoj.

Rilataj Produktoj
-

4H-semi HPSI 2 coloj SiC substratoblato Produktado...
-
Propra kvadrata skatolo transportskatolo kvadrata fenestro p...
-

6-cola HPSI SiC-substrata oblato el Silicia Karbido ...
-

Safira Korundo por Ĝemo Al2O3 kristala ru...
-

Aluminia metala unu-kristala substrata poluro...
-

Au-kovrita oblato, safira oblato, silicia oblato...